
Mensch und Maschine trafen sich auf der Leipziger Messe zur Roboterweltmeisterschaft RoboCup 2016. Bei der Amazon Picking Challenge traten 16 Hochschulteams aus aller Welt mit ihren neuesten Entwicklungen für das autonome Einlagern und Kommissionieren von Waren in den Wettstreit.
„Three, two, one – go!“, sagt der Preisrichter Sarath Krishnaswamy von Amazon Robotics und zählt den Countdown herunter. Auf Kommando setzt sich der blauweiße Roboter des Teams Delft in Bewegung. Er richtet seine drei Gelenke aus und bewegt sie in Richtung der vor ihm aufgestellten Box. In ihren zwölf Fächern befinden sich 40 Gegenstände in verschiedener Form, Haptik und Konsistenz. Aufgabe des Roboters ist es, zwölf davon innerhalb von 15 Minuten autonom und unbeschadet herauszunehmen, in dem roten Korb darunter abzulegen und keine Unordnung in der Box zu hinterlassen. Keine leichte Aufgabe für eine Maschine. „Dafür sind sehr viele visuelle, taktile und haptische Wahrnehmungsfähigkeiten notwendig“, sagt Joey Durham von Amazon Robotics. Der Roboter orientiert sich kurz über eine integrierte 3D-Kamera, leuchtet in eines der Fächer und greift nach einer Flasche Bastelkleber. Ordnungsgemäß und unbeschädigt legt er sie in den Korb. Das staunende Publikum belohnt den ersten gelungenen Pick dieser Challenge mit Applaus. Bei dem niederländischen Team der TU Delft & Delft Robotics läuft es heute ziemlich gut.
Menschen von lästigen Routinearbeiten befreien
Auf der RoboCup-Weltmeisterschaft in den Leipziger Messehallen tummeln sich in diesen Tagen menschen- und tierähnliche Maschinen. Zwischen niedlichen Fußballspielern aus Hard- und Software und der stoisch unter dem Dach von Halle 4 kreisenden Riesenrobotermöwe von Festo klingt es abwechselnd nach dem schweren Atmen von Darth Vader, nach Großreinemachen mit Industriestaubsaugern und nach dem hochfrequenten Fiepen eines fiesen Zahnarztbohrers.
Diese spezielle Geräuschkulisse gehört zur Amazon Picking Challenge. Der Innovationswettbewerb, der mit einem Preisgeld von 80.000 US-Dollar dotiert ist, soll den Austausch zwischen Wissenschaft und Industrie in der Robotik stärken. 16 Forscherteams aus aller Welt schicken hier ihre selbst konstruierten Roboter in den Wettstreit. In ihren zugewiesenen Parzellen in Halle 4 nutzen sie die Zeit bis zu ihrem Einsatz für Tests und Feinjustierungen. Das US-Team von Dataspeed-Grizzly von der Dataspeed Inc. & Oakland University etwa hat seine Box und seinen Roboter noch schnell mit einer Plane abgedeckt, um Blendungen von den Oberlichtern der Halle zu vermeiden. Ihre vierbeinige Entwicklung bewegt sich nämlich nicht auf einer Schiene wie die des Teams Delft, sondern frei auf einem Teppich von QR-Codes.
Im vergangenen Jahr siegte das deutsche Team Robotics & Biology Lab von der TU Berlin mit einer Saugvorrichtung. Diese Entwicklung griffen die Teams in diesem Jahr auf, schließlich geht es um das gemeinsame Weiterentwickeln des Vorhabens, Menschen von den lästigen Routinearbeiten wie Einlagern und Kommissionieren in den Logistiklagern durch Roboter zu entlasten. Und es geht natürlich auch um mehr Effizienz in Zeiten, in denen die Kunden ihre online bestellten Waren am liebsten noch am selben Tag erhalten wollen.
Die Roboter lernen von selbst dazu
Inzwischen hat der Amazon-Preisrichter Sarath Krishnaswamy mit seinen beiden Helfern das Ergebnis für Team Delft errechnet: stolze 105 Punkte. Schon jetzt gilt Delft als Geheimfavorit, da es bereits am Tag zuvor die „Stowing Challenge“, den Einlagerungswettbewerb, gewonnen hat. Kann das deutsche Team NimbRo Picking unter der Leitung von Professor Sven Behnke von der Uni Bonn diese Punktzahl toppen? Die Bonner haben schon mehrere Preise bei Roboterwettbewerben gewonnen und belegten am Tag zuvor beim Einlagerungswettbewerb Platz zwei. Die besondere Herausforderung beim heutigen Wettbewerb sieht Behnke in der Oberflächenstruktur der verschiedenen Gegenstände. „Für die Sensoren sind transparente Artikel und glänzende Oberflächen schwierig zu erfassen“, sagt er.
Auch der deutsche Roboter leistet ordentliche Arbeit. Er leuchtet in die Fächer und „sauggreift“ beherzt einen Gegenstand nach dem anderen heraus: eine Schachtel Wachsmalstifte, eine Bürste, einen Becher, einen Teddy. An der Schere mit dem rosafarbenen Griff scheitert er. Sie fällt hinunter. „Wir verwenden eine Saug-Greifer-Technologie, die einen guten Oberflächenabschluss zwischen dem zu saugenden Objekt und dem Faltenbalg braucht“, sagt Behnke. „Die Schere ist einfach zu löchrig, da bläst die Luft vorbei.“ Zugegeben, im Lager wäre diese Schere in einer Schachtel verpackt und die Löcher damit kein Problem. Mit 97 Punkten liegen die Bonner jetzt auf Platz zwei hinter Delft. „Wir sind mittel zufrieden mit der Leistung, wir hatten schon deutlich bessere Leistungen erzielt“, sagt der Bonner Professor.
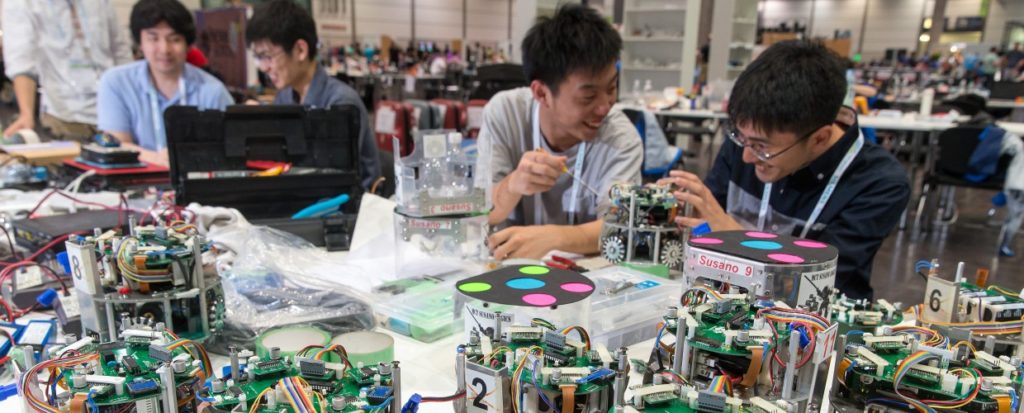
Rund um die Parzelle des japanischen Teams C^2M (ausgesprochen „C Quadrat M“) der Chubu University, Chukyo University, und Mitsubishi Electric, hat sich jetzt eine Menschentraube gebildet. Drei Kamerateams haben die Forscher in ihren türkisfarbenen T-Shirts und weißen Helmen im Visier, was vor allem am Teamleiter liegt. In Japan war Hironobu Fujiyoshi ein beliebter Rockstar. Nach Streitigkeiten mit seiner Band stieg der Professor für Maschinelles Sehen aus und fokussiert sich seither mit seinem Roboter-Team auf die gleichmütigen Maschinen. Bei der letztjährigen Amazon Picking Challenge hat er den sechsten Platz belegt. In diesem Wettbewerb greift der Roboter lediglich ein Plüschtier am Bein, dafür gibt es 21 Punkte. „Ein bisschen traurig bin ich schon“, sagt Fujiyoshi. Die Ursache für die häufigen Fehlgriffe seines Roboters vermutet er in der Software, die er mit seinem Team für die kommende Challenge auf Vordermann bringen will.
„Deep Learning“ nennen die Experten die Fähigkeit der Roboter, von selbst dazuzulernen. Je mehr kognitive Fähigkeiten ein Computer hat, desto weniger strukturiert muss ein Logistikzentrum sein. Desto weniger braucht es also beispielsweise Markierungen oder Fahrspuren für fahrerlose Gabelstapler.
Schnelligkeit ist genauso wichtig wie Präzision
Nun ist die Reihe an PFN, Preferred Networks, Inc. aus Japan und Kalifornien, den „Zahnärzten“ des Wettbewerbs mit ihrem hochfrequent piependen, quietschgelben Roboter. Der Deutsche Tobias Pfeiffer leitet das Team. „Für das Greifen der Objekte benutzen wir einen Vakuumsauger, aber manche Artikel sind zu schwer dafür“, erläutert er. „Wir haben einen anderen Endeffektor mit einer Hand konstruiert, doch auch bei dieser Lösung verbesserte sich die Problematik mit den verschiedenen Formen nicht. Ein passender Lernalgorithmus für die Objekterkennung in Kameradaten und die Lokalisierung des besten Greifpunktes am Objekt sind weitere Herausforderungen, die wir noch bewältigen müssen.“
Carlos Hernandez Corbato vom Team Delft verfolgt mit großem Interesse, wie der lange Greifarm von PFN ein Objekt nach dem anderen in der Box anpeilt, es äußerst geräuschvoll ansaugt und regelkonform in den Korb befördert. „Ich glaube, sie werden gewinnen“, sagt er anerkennend. Tatsächlich erreicht PFN dieselbe Bewertung wie Delft: 105 Punkte. Ein Rückblick, wie schnell welches Team das erste Objekt gegriffen hat, gibt am Ende des Tages den Ausschlag. Das Team Delft überzeugt sowohl in der Kategorie Schnelligkeit als auch in der Präzision. Das Team PFN erhält als Zweitplatzierter noch einen äußerst sinnvollen Sonderpreis: einen Gehörschutz.